Welding And Cutting Equipment Manufacturer since 2000
- CNC / Laser Cutting Equipments
- Welding Equipments Series
- Beveling Milling Equipments
- Rental Products


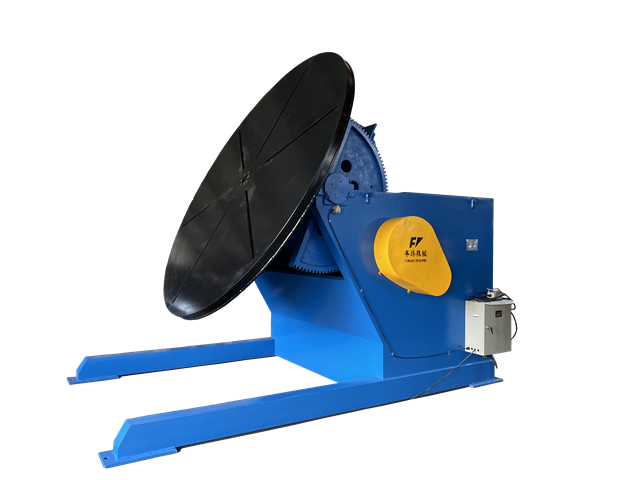
Although welding robot has five or six degrees of freedom, the welding torch can arrive at an arbitrary point within the scope of operation in the desired attitude butt welds, but in practice, for some complex welding parts, if it does not change its position in time, it may interfere with the structure of the torch, so that the torch cannot be welded along the set path. In addition, in order to ensure welding quality and improve production efficiency, it is often necessary to adjust the welding seam to the optimal position for welding. Therefore, it is also necessary to timely change the position of welding parts. Based on the above two reasons, welding robots are almost all equipped with the corresponding welding positioner to carry out welding, among which turning machines, positioners, and rotary tables are the most.

As mentioned above, there are two kinds of motion coordination between welding positioner and welding robot: asynchronous coordination and synchronous coordination. The former is the positioner does not move when the robot is welding. At the end of the robot welding, the welding positioner will adjust the welding part to a certain optimal position and proceed to the next welding seam according to the instruction. This cycle continues until all the welds on the welds have been welded. The latter not only has the function of non-synchronous coordination, but also, when the robot is welding, the welding positioner can coordinate the movement with the welding parts according to the corresponding instructions, so as to continuously place the space curve welding seems to be welded in the horizontal or ship-shape position. Since most welding structures are space linear welds and plane curved welds, and the control system of asynchronous coordinated motion is relatively simple, the motion coordination between welding positioner and the robot is mostly in the form of asynchronous coordinated motion.
The two kinds of coordinated motion have different requirements on the accuracy of the welding positioner. In addition to the requirement of high accuracy, synchronization coordination also requires high trajectory accuracy and motion accuracy. This is the main difference between robot welding positioner and ordinary welding positioner.

Generally, the positioning accuracy of welding robot is usually between 0.1 and 1mm, and correspondingly the positioning accuracy of welding positioner should also be within this range. Now, with the positioning accuracy of 1mm, the rotation error of the positioner's worktable should be controlled within 0.36° for welding seams with a distance of 500mm from the rotary or inclined center. For welds separated by 1000mm, they should be controlled within 0.18°. Therefore, the larger the welding piece is, the farther the weld is from the rotation or tilt center, and the higher the accuracy of the rotation angle of the positioner is required. This undoubtedly increases the difficulty of manufacturing and controlling large welding positioner.
For more details, please contact us: www.wxfengwei.com.

Get in touch with us today to find out more about our services.